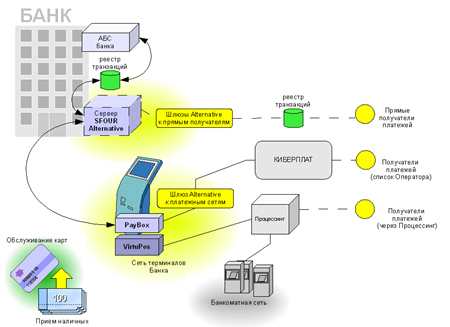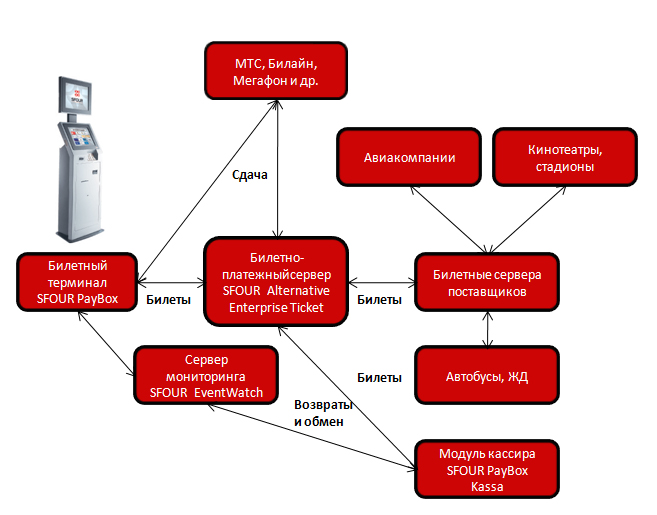
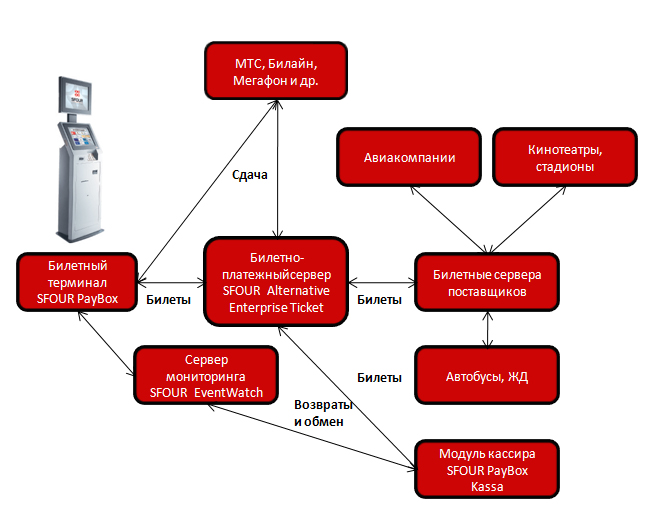
Билетно-платежный сервер SFOUR Alternative Enterprise Ticket
7 Июня 2023, 06:03
1590
NTT и Mitsubishi разработали систему дистанционного управления роботами с малой задержкой
Отправить
Твитнуть
Поделиться
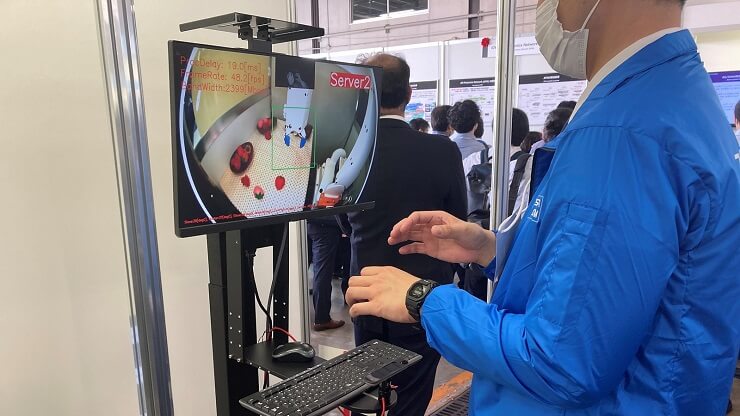
NTT и Mitsubishi Electric разработали технологию, позволяющую дистанционно управлять промышленными роботами с малой задержкой. Благодаря новой системе можно будет проще применять роботов для дистанционного управления в сложных работах, таких как ремонт оборудования и хирургия. Недавно разработанная технология отслеживает в режиме реального времени состояние коммуникационной сети, соединяющей удаленные рабочие места и сервер, управляющий роботом. При ухудшении работоспособности робота низкая задержка достигается за счет автоматического быстрого переключения на другой канал связи.
Новая технология была разработана путем объединения технологии оптической связи NTT «APN (All-Photonics Network)» и системы дистанционного управления Mitsubishi Electric «Visual Haptics». Компании разработали систему дистанционного управления роботами с помощью Visual Haptics и APN от NTT.
Visual Haptics преобразует тактильную информацию, полученную датчиком руки робота, в цветовую информацию и отображает ее на удаленном экране вместе с изображением с камеры. В отличие от других систем дистанционного управления, тактильная информация представлена в виде визуальной информации, а не в виде физического стимула. Оператор удаленно управляет роботом, наблюдая за экраном. Однако при задержках связи интуитивное управление становится затруднительным.
В результате тестирования, когда увеличивалась нагрузку на сервер и ухудшалась удаленная управляемость, удалось переключить канал связи примерно за 100 мс и продолжить работу без какого-либо дискомфорта.
Читайте наш канал в
Telegram
:
узнавайте о главных новостях дня первыми.
Рассылка «Киосксофта»
Подпишитесь на нашу рассылку, чтобы быть в курсе новостей. Получай только важные новости раз в неделю по понедельникам.