Сегодня
58

Многие рабочие процессы были бы почти немыслимы сегодня без роботов. Но роботы, работающие на производственных объектах, часто представляют опасность для работников, потому что они недостаточно четко реагируют на окружающую среду.
Чтобы в будущем людям и роботам было легче работать в непосредственной близости, профессор Матиас Альтофф из Технического университета Мюнхена (TUM) разработал новую систему (IMPROV), в которой используются взаимозависимые модули с самопрограммированием.
Когда компании используют роботов для производства товаров, им, как правило, приходится помещать своих автоматических помощников в защитные клетки, чтобы снизить риск травмирования людей, работающих поблизости. Новая система может вскоре освободить роботов из клеток и изменить стандарты в мире автоматизации.
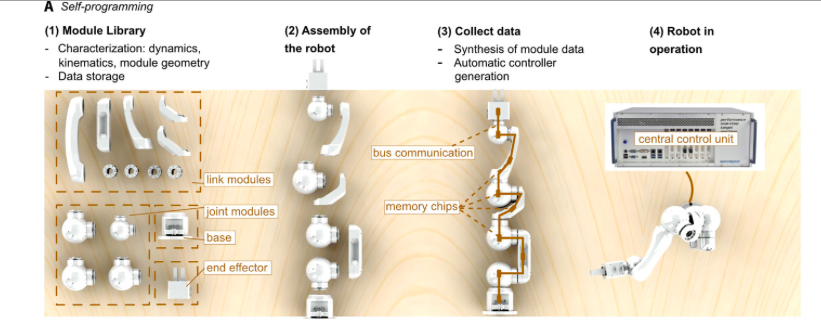
Матиас Альтофф разработал принцип набора инструментов для простой сборки безопасных роботов с использованием различных компонентов. Модули можно комбинировать практически любым желаемым способом, что позволяет компаниям настраивать роботов для широкого спектра задач или просто заменять поврежденные компоненты. Система IMPROV была представлена в статье журнала «Science Robotics».
Встроенный чип позволяет роботу программировать себя. Матиас Альтофф оснастил каждый модуль в своем наборе инструментов для роботов IMPROV микросхемой, которая позволяет каждому модульному роботу программировать себя на основе своего собственного индивидуального инструментария.
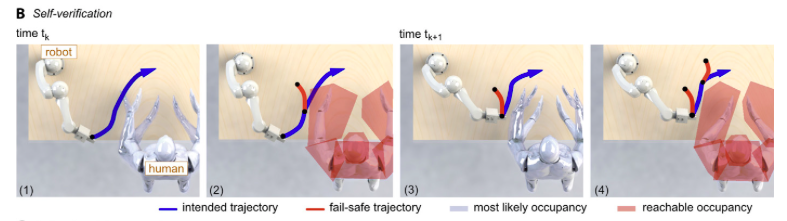
Чтобы учесть динамически изменяющуюся среду, робот сам способен проверить, может ли кто-нибудь пострадать в результате его запланированных действий во время работы. Поскольку существуют бесчисленное количество вероятных действий окружающих людей, разработчики новой системы ограничили набор возможных движений робота, используя анализ достижимости.
В то же время центр управления роботом использует данные с камер, установленных в помещении, для сбора данных о перемещениях людей, работающих поблизости. Используя эту информацию, робот, запрограммированный с помощью IMPROV, способен моделировать возможные последующие перемещения всех соседних рабочих. В результате он может остановиться, прежде чем соприкоснуться, например, с рукой или с другими приближающимися объектами.
Читайте наш канал в
Telegram
:
узнавайте о главных новостях дня первыми.